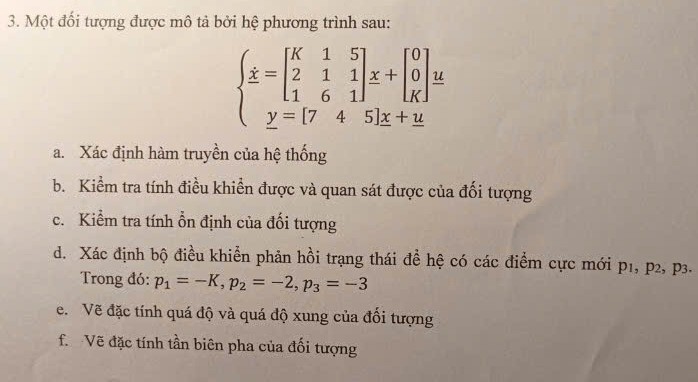
Giải giúp mình với K=9 ----- Nội dung ảnh ----- 3. Một đối tượng được mô tả bởi hệ phương trình sau:
\[ \begin{cases} \dot{x} = \begin{bmatrix} K & 1 & 5 \\ 2 & 1 & 1 \\ 1 & 6 & 1 \end{bmatrix} x + \begin{bmatrix} 0 \\ 0 \\ K \end{bmatrix} u \\ y = \begin{bmatrix} 7 & 4 & 5 \end{bmatrix} x + u \end{cases} \]
a. Xác định hàm truyền của hệ thống b. Kiểm tra tính điều khiển được và quan sát được của đối tượng c. Kiểm tra tính ổn định của đối tượng d. Xác định bộ điều kiện phản hồi trạng thái để hệ có các điểm cực mới \(p_1, p_2, p_3\). Trong đó: \(p_1 = -K, p_2 = -2, p_3 = -3\) e. Vẽ đặc tính quá độ và quá độ xung của đối tượng f. Vẽ đặc tính tần biến pha của đối tượng
Bằng cách nhấp vào Đăng nhập, bạn đồng ý Chính sách bảo mật và Điều khoản sử dụng của chúng tôi. Nếu đây không phải máy tính của bạn, để đảm bảo an toàn, hãy sử dụng Cửa sổ riêng tư (Tab ẩn danh) để đăng nhập (New Private Window / New Incognito Window).

 Trang chủ
Trang chủ Giải bài tập Online
Giải bài tập Online Dịch thuật
Dịch thuật Flashcard - Học & Chơi
Flashcard - Học & Chơi Cộng đồng
Cộng đồng Khảo sát ý kiến
Khảo sát ý kiến Hỏi đáp tổng hợp
Hỏi đáp tổng hợp Đố vui
Đố vui Đuổi hình bắt chữ
Đuổi hình bắt chữ Quà tặng và trang trí
Quà tặng và trang trí Truyện
Truyện Xem lịch
Xem lịch Chia sẻ hàng ngày
Chia sẻ hàng ngày Bảng xếp hạng
Bảng xếp hạng



 Trả lời nhanh trong
Trả lời nhanh trong 


 Xem thêm
Xem thêm 













 Thưởng th.11.2024
Thưởng th.11.2024 Bảng xếp hạng
Bảng xếp hạng