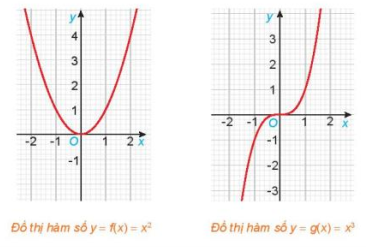
Cho hai hàm số f(x) = x2 và g(x) = x3, với các đồ thị như hình dưới đây. a) Tìm các tập xác định Df, Dg của các hàm số f(x) và g(x). b) Chứng tỏ rằng f(– x) = f(x), ∀ x ∈ Df. Có nhận xét gì về tính đối xứng của đồ thị hàm số y = f(x) đối với hệ trục tọa độ Oxy? c) Chứng tỏ rằng g(– x) = – g(x), ∀ x ∈ Dg. Có nhận xét gì về tính đối xứng của đồ thị hàm số y = g(x) đối với hệ trục tọa độ Oxy?
Cho hai hàm số f(x) = x2 và g(x) = x3, với các đồ thị như hình dưới đây.
a) Tìm các tập xác định Df, Dg của các hàm số f(x) và g(x).
b) Chứng tỏ rằng f(– x) = f(x), ∀ x ∈ Df. Có nhận xét gì về tính đối xứng của đồ thị hàm số y = f(x) đối với hệ trục tọa độ Oxy?
c) Chứng tỏ rằng g(– x) = – g(x), ∀ x ∈ Dg. Có nhận xét gì về tính đối xứng của đồ thị hàm số y = g(x) đối với hệ trục tọa độ Oxy?

 Trang chủ
Trang chủ Giải bài tập Online
Giải bài tập Online Dịch thuật
Dịch thuật Flashcard - Học & Chơi
Flashcard - Học & Chơi Cộng đồng
Cộng đồng Khảo sát ý kiến
Khảo sát ý kiến Hỏi đáp tổng hợp
Hỏi đáp tổng hợp Đố vui
Đố vui Đuổi hình bắt chữ
Đuổi hình bắt chữ Quà tặng và trang trí
Quà tặng và trang trí Truyện
Truyện Xem lịch
Xem lịch Chia sẻ hàng ngày
Chia sẻ hàng ngày Bảng xếp hạng
Bảng xếp hạng







 Trả lời nhanh trong
Trả lời nhanh trong 


 Xem thêm
Xem thêm 












 Thưởng th.11.2024
Thưởng th.11.2024 Bảng xếp hạng
Bảng xếp hạng